Research Projects:
I have been involved with the following projects over the past several years:
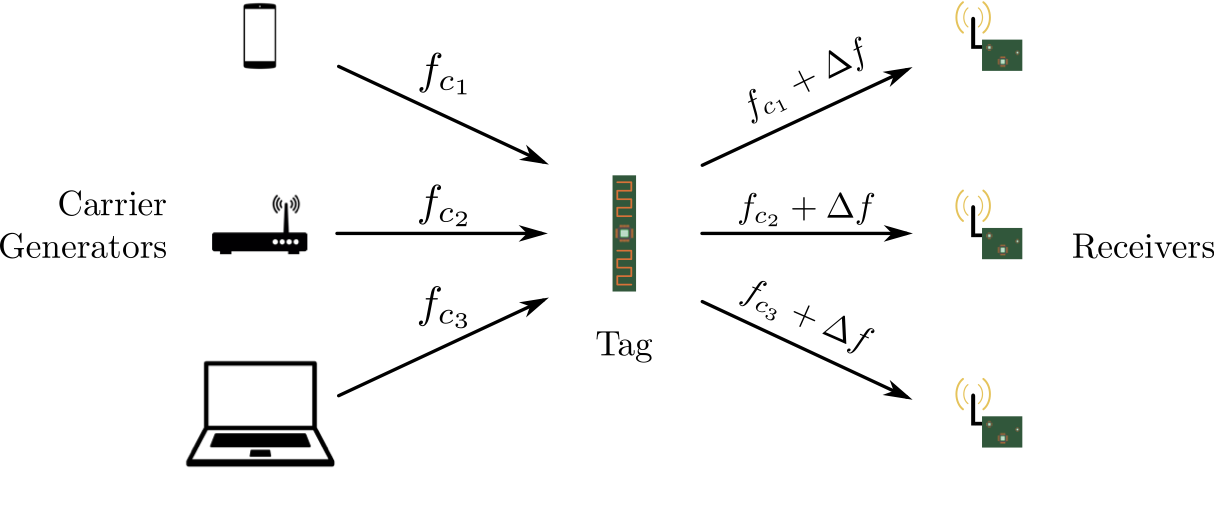
Long range, low cost and low-complexity backscatter architecture
Computational RFIDs like WISPs and Umass Moo have been used to prototype battery-free applications for close
to a decade. Further, passive RFID tags enjoy widespread deployment and are used for applications such as
retail store management, identification etc. However, all of these applications suffer from constraints
of the reader used to query the tags. Existing RFID readers are expensive (over 2000 USD), energy-expensive
and also achieve relatively short communication range of few meters. We have developed an architecture
of backscatter tag, reader and carrier generators which achieves two orders of magnitude higher range
than existing RFID readers while also being inexpensive (70 USD).
Our results demonstrate ability to communicate to distances upto 1 km while
consuming 70 microwatts at the backscatter tag.
To be presented in: ACM SenSys 2017. Brief video: Youtube
Publication: Find it here
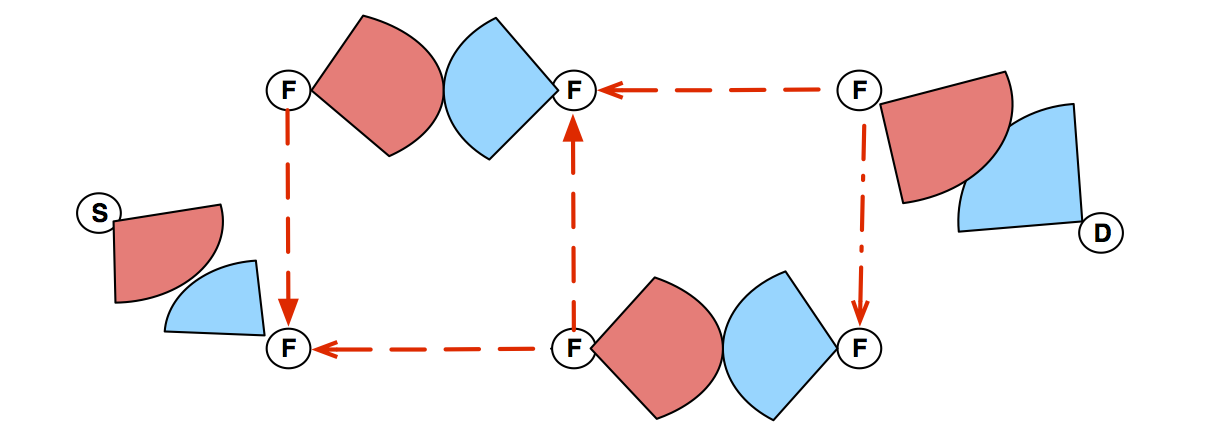
Electronically Steerable Directional antennas for communication
Electronically steerable directional antennas allow electronic control of the direction of antenna gain. We can control the direction of the antenna through software. Such antennas
enable better use of spectrum by reducing wireless contention. We developed the first test bed of sensor nodes equipped with ESD antennas in the world. Using the testbed, we developed
a high-through communication protocol DPT which communicates bulk data such as sensor readings at highest demonstrated throughput on IEEE 802.15.4/ZigBee multihop networks.
The key to high throughput achieved by DPT is constructing disjoint paths to forward packet, while also using only one wireless channel.
Presented in: ACM SenSys 2015. Video of the talk: Youtube
Ultra-low power ZigBee/BLE transmissions
Battery-free visible light sensing
Visible Light Communication
Electronically Steerable Directional antennas for localisation